


31.05.2021 /
Engelberg Tunnel - Launch of the Automated Manipulator
The Automated Manipulator specifically designed for the Engelberg project was transported and launched in the tunnel.

The system is desined to position tunnel reinforcement ribs with an automated system controlled by a PLC unit. All the movements follow a defined sequence developed by the Engineering and Software departments with 14 control interpolated servo-hydraulic axes and 13 different trajectories.
The complex and powerful machine has 5 different communication systems linked in real time.
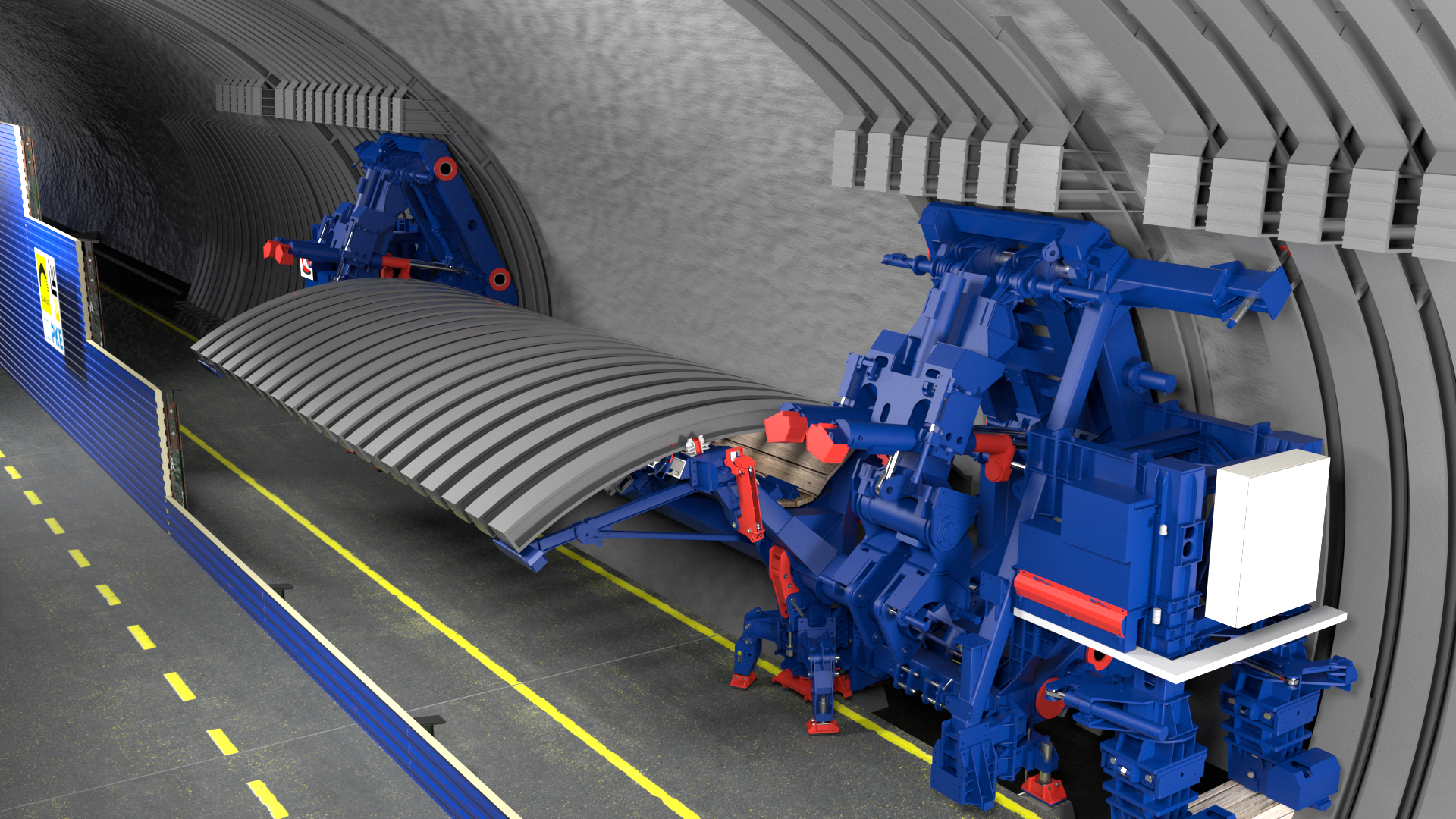
The development of the solution took more than 1 year and involved several competence teams, risk assessments and process simulations by KERN Lab in order to define any detail of the complete work cycle.
After a complete pre-assembly and test at our KTS Facility, the machine has been disassembled and delivered in big parts.



Thanks and congratulation to everyone involved.
Special Service Dismantling Gantry - FAT
19.02.2024 / News
HS2 - West Ruislip Crosspassage Lining
29.12.2023 / News
2023 Highlights
21.12.2023 / News
Gubrist Tunnel - Installation completed
11.12.2023 / News
HRBT Egress Formworks - First FAT
27.10.2023 / News

